ROS – برمجة RC والطائرات بدون طيار
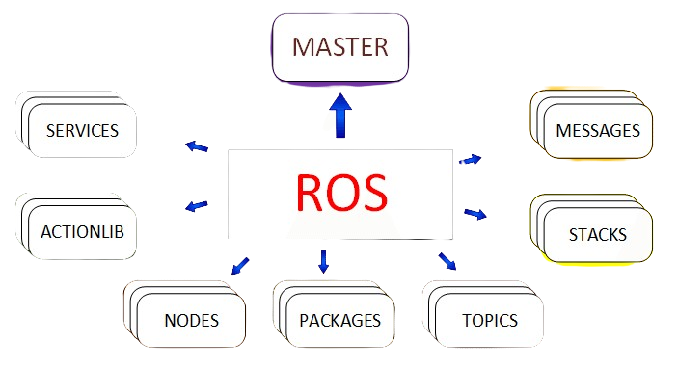
يُستخدم ROS (نظام تشغيل الروبوتات) على نطاق واسع في مجالات البحث، والصناعة، والتعليم. وعلى الرغم من أنه يُطلق عليه نظام تشغيل، إلا أنه يُسهل العديد من الوظائف مثل التحكم في الأنظمة الروبوتية، ومعالجة بيانات المستشعرات، والملاحة، وتكامل الذكاء الاصطناعي، وغير ذلك الكثير.
يُوفر كل هذه الميزات للمستخدمين من خلال أدوات مختلفة.
يُعد ROS منصة برمجية مفتوحة المصدر لتطوير الأنظمة الروبوتية والتحكم بها.
ويُستخدم ROS على نطاق واسع في برمجة الطائرات بدون طيار (UAV) لتعزيز قدرات الطيران الذاتي لهذه الطائرات.
بفضل بنيته المعيارية، يسمح ROS بإنشاء أنظمة روبوتية معقدة من خلال دمج مكونات مختلفة.
أما RC، فيؤدي دور وحدة تحكم عن بُعد.
في الطائرات بدون طيار، مثل الطائرات المُسيّرة، يُتيح RC للمستخدمين التحكم في حركات الطائرة، ومساراتها، ومعلمات أخرى عن بُعد.
تقليديًا، يقوم الطيار أو المشغل بالتحكم في الطائرة يدويًا باستخدام جهاز تحكم عن بعد.
ومع تطور التكنولوجيا، أصبحت الطائرات الحديثة عادةً مزودة بقدرات طيران ذاتي.
وبفضل ذلك، يمكنها تنفيذ مهام أو مسارات معينة بشكل تلقائي.

يُعد ROS منصة برمجية مفتوحة المصدر تحتوي على مجموعة من الأدوات والمعارف اللازمة لتطوير تطبيقات روبوتية.وبفضل بنيته المعيارية، يمكن الجمع بين مكونات مختلفة لإنشاء أنظمة روبوتية معقدة.يُوفر ROS مجموعة من الوظائف الأساسية مثل الاتصال، ومعالجة بيانات المستشعرات، والتحكم في الحركة، والملاحة، والتصور. يُعتبر ROS أداة قوية جدًا لتحسين قدرات الطيران الذاتي للطائرات بدون طيار.وغالبًا ما تُجهز الطائرات بدون طيار بأنواع مختلفة من المستشعرات.خلال الرحلات، يجب معالجة البيانات القادمة من هذه المستشعرات واتخاذ قرارات بشأن الطيران.وهنا يأتي دور برنامج ROS.تم تطوير ROS وتجهيزه لتنفيذ مهام مثل معالجة بيانات المستشعرات، ورسم الخرائط، وتحديد المواقع، وتخطيط المسارات، والتحكم في الطيران. يمتلك ROS العديد من الواجهات والأدوات المختلفة في مجال برمجة الطائرات بدون طيار.وهذه الأدوات ضرورية لإجراء العمليات المختلفة.يمكن تلخيص أدوار ROS في برمجة الطائرات بدون طيار على النحو التالي: دمج البيانات:يُستخدم ROS لدمج البيانات الواردة من مختلف مستشعرات الطائرات بدون طيار في نظام واحد.يُساعد ذلك على تكوين مجموعة بيانات شاملة لاتخاذ قرارات الطيران. التحكم في الطيران:يُستخدم ROS لتثبيت الطائرة بدون طيار وضمان طيرانها نحو مسار أو نقطة معينة.يمكن تنفيذ استراتيجيات تحكم مختلفة على ROS، بدءًا من وحدات التحكم PID وصولًا إلى خوارزميات أكثر تعقيدًا. تخطيط المسار:يُوفر ROS خوارزميات مختلفة لتخطيط المسارات، مما يُمكّن الطائرات بدون طيار من الطيران بأمان إلى هدف أو منطقة معينة.ويُستخدم ذلك لتجنب العوائق وإنشاء مسار طيران آمن. المحاكاة:يمكن استخدام ROS لمحاكاة الطائرات بدون طيار قبل تطبيقها في العالم الحقيقي.وهذا يُسرّع عملية التطوير ويُقلل من التكاليف.
تتطور صناعة الطائرات بدون طيار بسرعة كبيرة.وتزداد الحاجة إلى هذه الطائرات بشكل يومي.وفي هذا السياق، تُصبح أهمية ROS في برمجة الطائرات بدون طيار أكثر وضوحًا في ظل التطور السريع لصناعة الطائرات بدون طيار.من المتوقع أن يتم تطوير ROS وتحسينه في المستقبل ليتمكن من تنفيذ مهام أكثر تعقيدًا.وكما هو الحال في مستقبل العديد من تقنيات البرمجيات، فإن دمج مجالات مثل الذكاء الاصطناعي، وتعلم الآلة، والتعلم العميق مع ROS يُعد من العوامل التي قد تُساهم في جعل الطائرات بدون طيار أكثر ذكاءً وكفاءة.وبفضل هذه التطورات والتحديثات التقنية، يمكن أن تُستخدم الطائرات بدون طيار على نطاق أوسع في التطبيقات الصناعية والتجارية المختلفة.ويُعد برمجة الطائرات بدون طيار باستخدام ROS من أبرز التطورات المستقبلية ذات الأهمية الكبيرة.