ROS – Programmazione RC e UAV
ROS (Robot Operating System), ampiamente utilizzato nei settori della ricerca, industriale ed educativo, pur essendo comunemente definito un sistema operativo, facilita molte funzioni come il controllo dei sistemi robotici, l’elaborazione dei dati dei sensori, la navigazione, l’integrazione dell’intelligenza artificiale e molto altro.
Fornisce tutto questo agli utenti tramite vari strumenti.
ROS è una piattaforma software open-source per lo sviluppo e il controllo di sistemi robotici.
L’utilizzo di ROS nella programmazione UAV (Veicoli Aerei Senza Equipaggio) è un metodo ampiamente preferito per migliorare le capacità di volo autonomo dei velivoli.
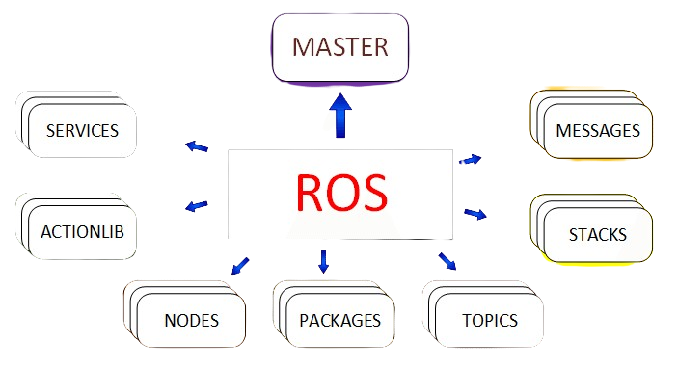
Grazie alla sua struttura modulare, ROS consente la creazione di sistemi robotici complessi combinando diversi componenti.
RC, invece, funziona come un tipo di telecomando.
Negli UAV, come ad esempio i droni, consente agli utenti di controllare a distanza i movimenti, le rotte e altri parametri degli UAV.
Tradizionalmente, un pilota o un operatore controlla manualmente l’UAV tramite un dispositivo di controllo remoto.
Tuttavia, con lo sviluppo della tecnologia, gli UAV moderni hanno generalmente capacità di volo autonomo.
Questo consente loro di svolgere automaticamente compiti o rotte predefinite.

ROS è una piattaforma software open-source che include un insieme di strumenti e conoscenze per sviluppare applicazioni robotiche.Grazie alla sua struttura modulare, è possibile combinare diversi componenti per creare sistemi robotici complessi.ROS fornisce una serie di funzionalità fondamentali come comunicazione, elaborazione dei dati dei sensori, controllo del movimento, navigazione e visualizzazione. ROS è uno strumento molto potente per migliorare le capacità di volo autonomo degli UAV.Gli UAV sono generalmente dotati di vari sensori.Durante il volo, è necessario elaborare i dati provenienti da questi sensori e prendere decisioni di volo.È proprio in queste operazioni che ROS entra in gioco.ROS è stato progettato e sviluppato per compiti come l’elaborazione dei dati dei sensori, la mappatura e la localizzazione, la pianificazione del percorso e il controllo del volo. ROS dispone di molte interfacce e strumenti differenti per la programmazione UAV.Questi sono necessari per varie operazioni.I ruoli di ROS nella programmazione UAV possono essere riassunti come segue: Integrazione dei Dati:ROS viene utilizzato per unificare i dati provenienti da vari sensori degli UAV in un unico sistema.Questo consente di ottenere un insieme completo di dati necessario per prendere decisioni di volo. Controllo del Volo:ROS viene utilizzato per stabilizzare gli UAV e farli volare su una rotta o verso un punto specifico.Diverse strategie di controllo, dai regolatori PID a algoritmi più complessi, possono essere implementate su ROS. Pianificazione del Percorso:ROS fornisce vari algoritmi di pianificazione del percorso per consentire agli UAV di volare in sicurezza verso un obiettivo o un’area.Questo viene utilizzato per evitare ostacoli e creare un percorso di volo sicuro. Simulazione:ROS può essere utilizzato per simulare gli UAV prima dell’applicazione nel mondo reale.Questo accelera il processo di sviluppo e riduce i costi.
L’industria dei droni si sta sviluppando molto rapidamente.La necessità di veicoli aerei senza equipaggio cresce ogni giorno.In questo contesto, il ruolo di ROS nella programmazione UAV sta diventando sempre più importante nel settore dei droni in rapida crescita.In futuro, si prevede che ROS sarà ulteriormente sviluppato e migliorato per consentire agli UAV di svolgere compiti più complessi.Come previsto nel futuro di molte tecnologie software, l’integrazione di campi come intelligenza artificiale, apprendimento automatico e apprendimento profondo con ROS sarà tra i fattori che possono rendere gli UAV più intelligenti ed efficaci.Con questi sviluppi tecnologici e aggiornamenti, gli UAV potranno essere utilizzati in modo più diffuso in molte applicazioni industriali e commerciali.La programmazione degli UAV con ROS, che sta aumentando in sviluppo e ambiti di applicazione, sarà tra gli sviluppi di grande importanza nei prossimi periodi.