ROS – RC 与无人机编程
ROS(机器人操作系统) 广泛用于科研、工业和教育领域,虽然通常被称为操作系统,但它实质上简化了机器人系统控制、传感器数据处理、导航、人工智能集成等众多功能。
它通过各种工具将这些功能提供给用户。
ROS 是一个用于机器人系统开发和控制的开源软件平台。
在无人机(UAV)编程中使用 ROS 是一种广泛采用的方法,用于提升飞行器的自主飞行能力。
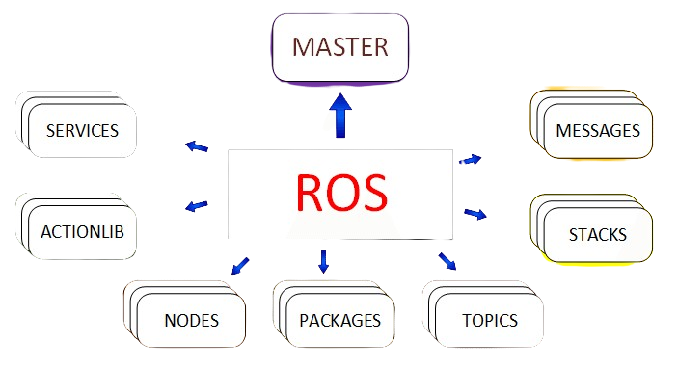
得益于其模块化结构,ROS 能够通过组合不同组件构建复杂的机器人系统。
而 RC 相当于一种远程控制装置。
在无人机(如无人机或无人直升机)中,RC 可用于远程控制其移动、航线以及其他参数。
传统上,飞行员或操作员通过遥控器手动控制无人机。
然而,随着技术的发展,现代无人机通常具备自主飞行能力。
因此,它们可以自动执行预设任务或路线。

ROS 是一个开源软件平台,包含一套开发机器人应用所需的工具与知识。得益于模块化结构,可以组合多个组件构建复杂的机器人系统。ROS 提供了通信、传感器数据处理、运动控制、导航和可视化等一系列核心功能。 ROS 是提升无人机自主飞行能力的非常强大的工具。无人机通常配备了各种传感器。在飞行过程中,需要对这些传感器数据进行处理并做出飞行决策。正是在这一过程中,ROS 发挥了作用。ROS 被设计用于执行诸如传感器数据处理、地图构建与定位、路径规划和飞行控制等任务。 在无人机编程中,ROS 提供了多种接口与工具。这些工具在多个操作中都很关键。ROS 在无人机编程中的作用可总结如下: 数据集成:ROS 用于将无人机各类传感器的数据整合到同一个系统中。这有助于构建完整的数据集,以便进行飞行决策。 飞行控制:ROS 被用于使无人机保持稳定并飞往指定路径或目标点。从 PID 控制器到更复杂的控制算法,ROS 都可以实现。 路径规划:为了确保无人机能够安全到达某个目标或区域,ROS 提供了多种路径规划算法。它可用于避开障碍物并生成安全的飞行路径。 仿真模拟:在无人机投入实际应用前,ROS 可用于其仿真模拟。这可以加快开发进程,减少成本。
无人机行业正在迅速发展。对无人机的需求也在不断增长。在这种背景下,ROS 在无人机编程中的作用在快速发展的无人机行业中显得越来越重要。未来,ROS 有望进一步完善和增强,使无人机能够完成更复杂的任务。正如许多软件技术的发展趋势所预测的那样,将人工智能、机器学习和深度学习与 ROS 集成,是提升无人机智能化和效率的重要手段。通过这些技术进步与更新,无人机将在工业和商业应用中得到更加广泛的应用。在功能扩展和应用范围持续增长的趋势下,使用 ROS 进行无人机编程,将成为未来极具重要性的技术发展之一。